设计特点
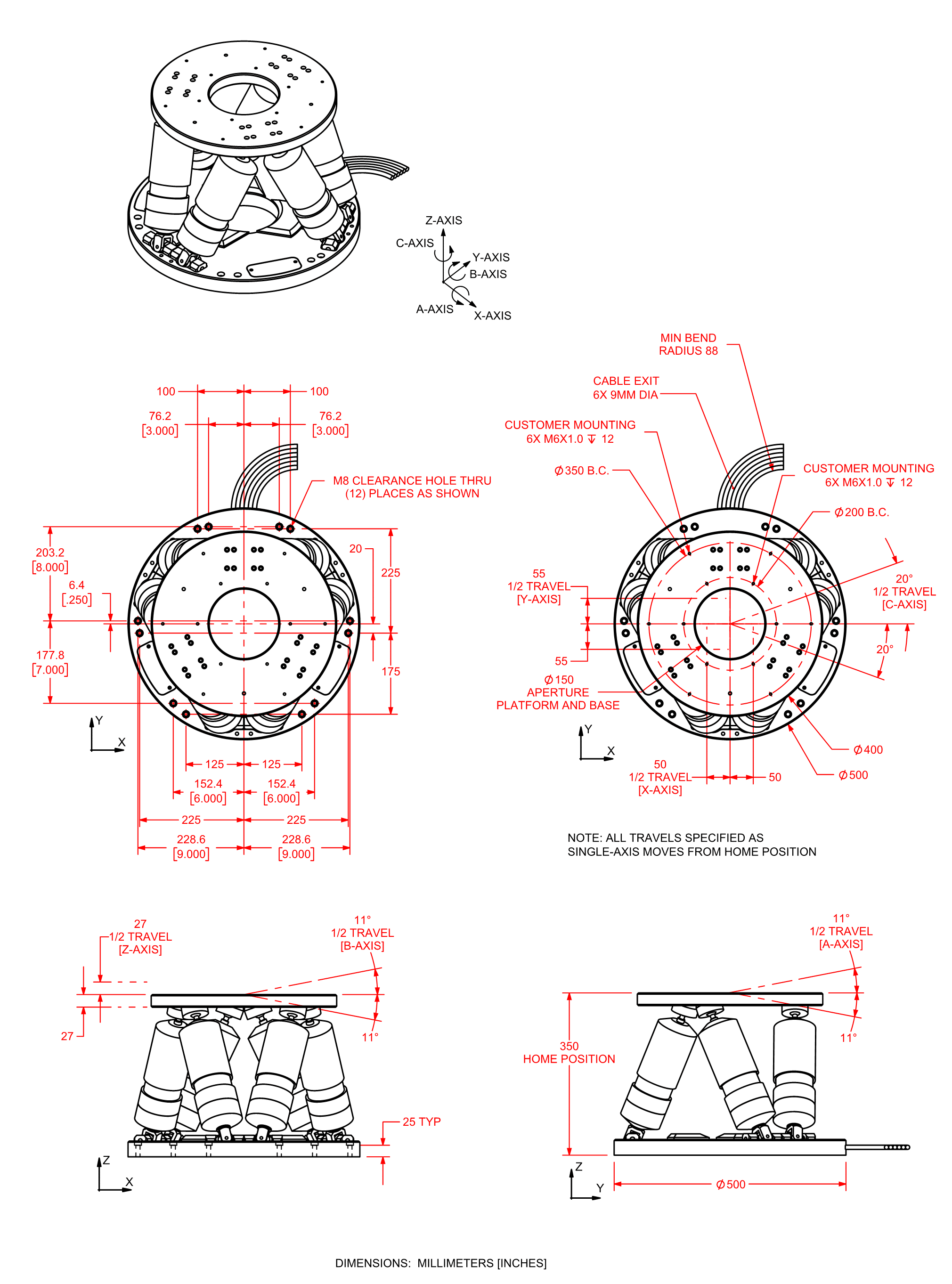
六自由度定位,线性行程可达 110 mm,角度行程可达 40°
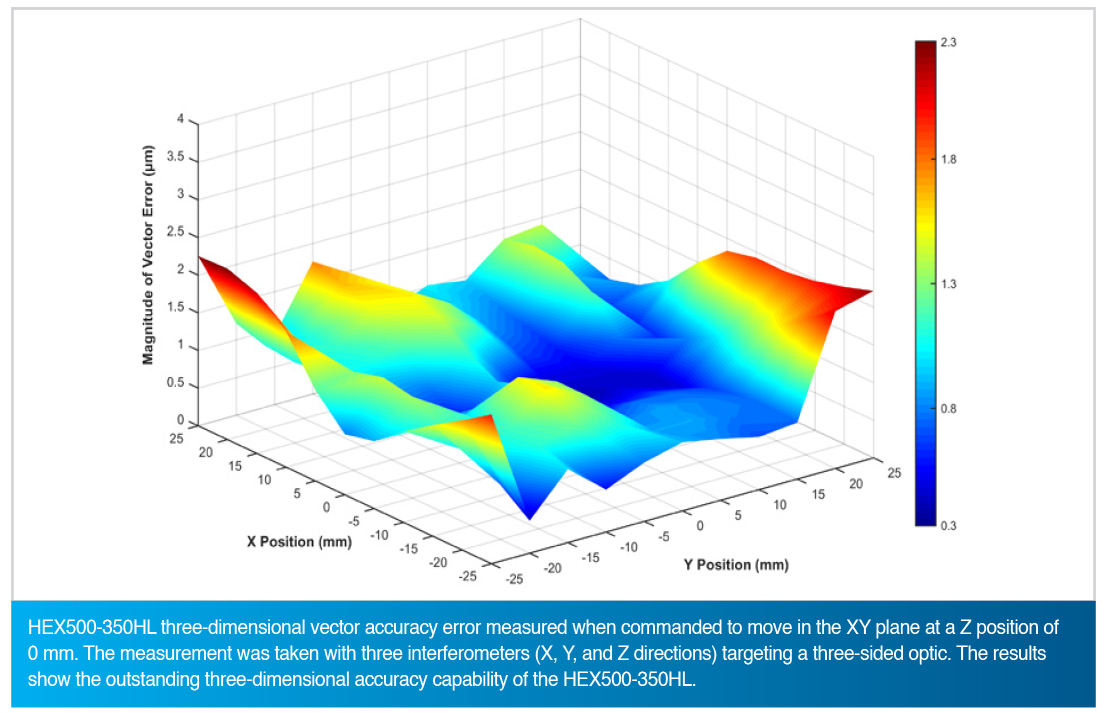
具有保证定位精度规格的精密设计
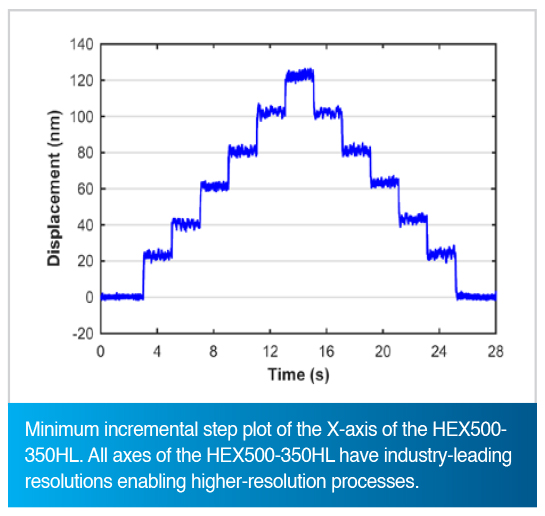
最小运动增量,在 XYZ 中为 20 nm,在 θxθyθz 中为 0.2 μrad
灵活的配置和定制
可根据要求提供真空制备
强大的控制和软件,可实现工件和刀具坐标系的可视化
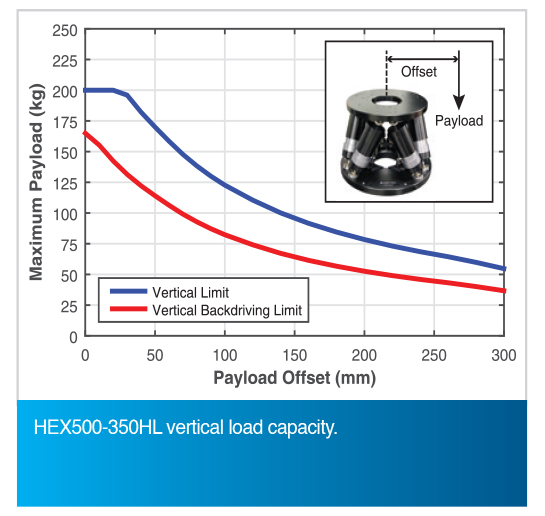
运动系统的设计和规格中存在许多权衡。HEX500-350HL 具有高负载能力、大行程、高速和亚微米级精度,不会迫使您在应用规格上妥协。
卓越的结构设计
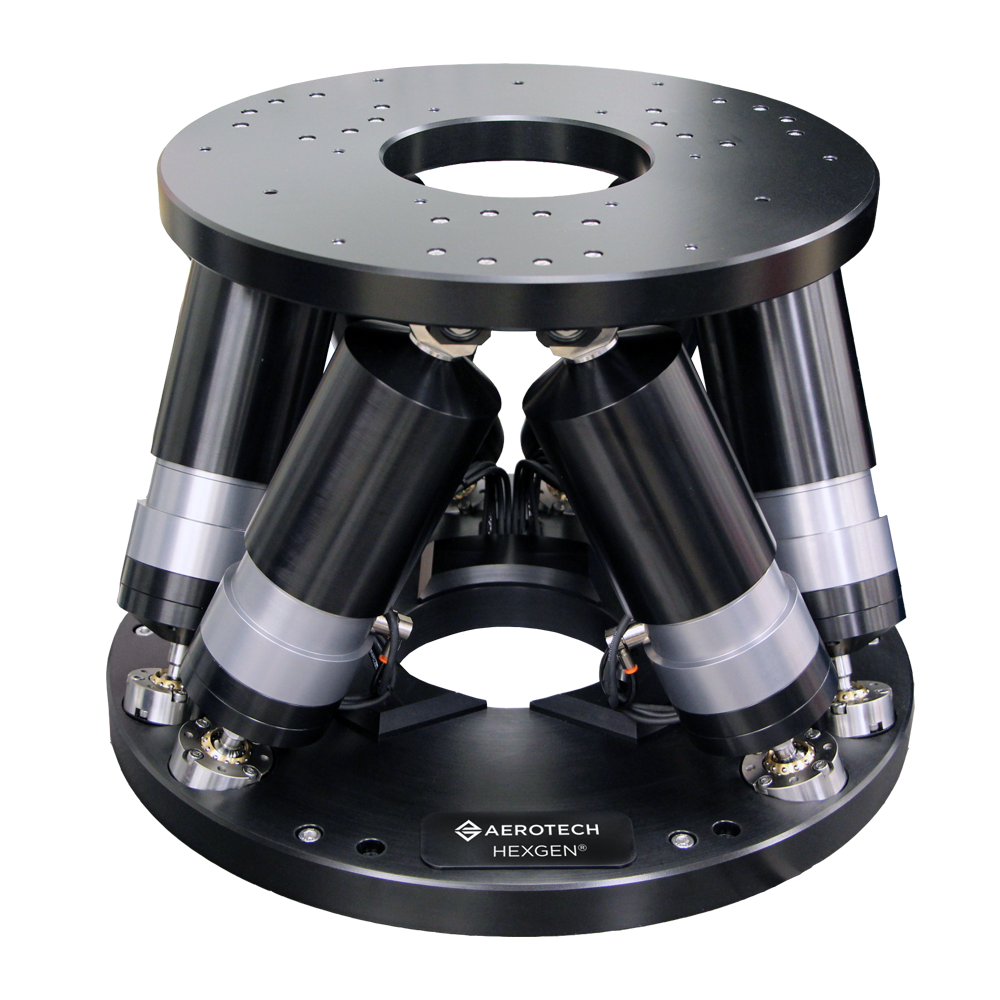
HEX500-350HL 由六个高精度支柱驱动,这些支柱由精密预紧轴承、滚珠丝杠和驱动部件制成。与由直流有刷伺服电机驱动的竞争性六脚架不同,HEX500-350HL 由交流无刷、无槽伺服电机驱动,可最大限度地延长设备使用寿命和性能。与使用皮带、齿轮箱或兼容联轴器的竞争设计相比,伺服电机直接连接到执行器滚珠丝杠,可提高驱动刚度、更高的定位精度和更好的最小增量运动(XYZ 为20 nm,θxθyθz 为0.2 μrad)。支柱枢轴接头经过精心设计,可提供低摩擦和高刚度,从而增强六足架的整体性能。
设计灵活性
HEX500-350HL 的设计考虑到了灵活性和定制性。平台和底座可以使用用户特定的功能或安装模式轻松修改。对于需要不同行程或独特性能参数的应用,可以根据该标准定制设计的运动学和/或结构布局。
HEX500-350HL 提供绝对值编码器选项,适用于在启动或断电时不需要移动的应用。底座和平台有一个直径为 150 毫米的透明孔,允许从底部接触工件。底座设计有安装孔,可直接适应英制或公制光学台。六脚架还可以进行真空制备,用于同步加速器样品或光学调整、半导体制造和检测或卫星传感器测试等要求苛刻的应用。
强大的控件和软件
驱动 HEX500-350HL 的是 Aerotech 的基于软件的 Automation1 机器控制器。Automation1 控制器建立在多年在困难运动学应用方面的经验之上,通过直观的界面和实时运动可视化,可以在多个用户定义的坐标系中对六脚架进行简单的编程和控制。Aerotech 的免费 HexGen™ 选型软件能够轻松模拟六足架的可用行程和工作空间。