精密级 6 轴定位系统
6 个自由度的并联运动设计,使其比串联运动系统更紧凑、更坚固,更高的动态性能,无需移动电缆:更高的可靠性,减少摩擦。由于采用折叠式驱动设计,结构紧凑。
PIVirtualMove
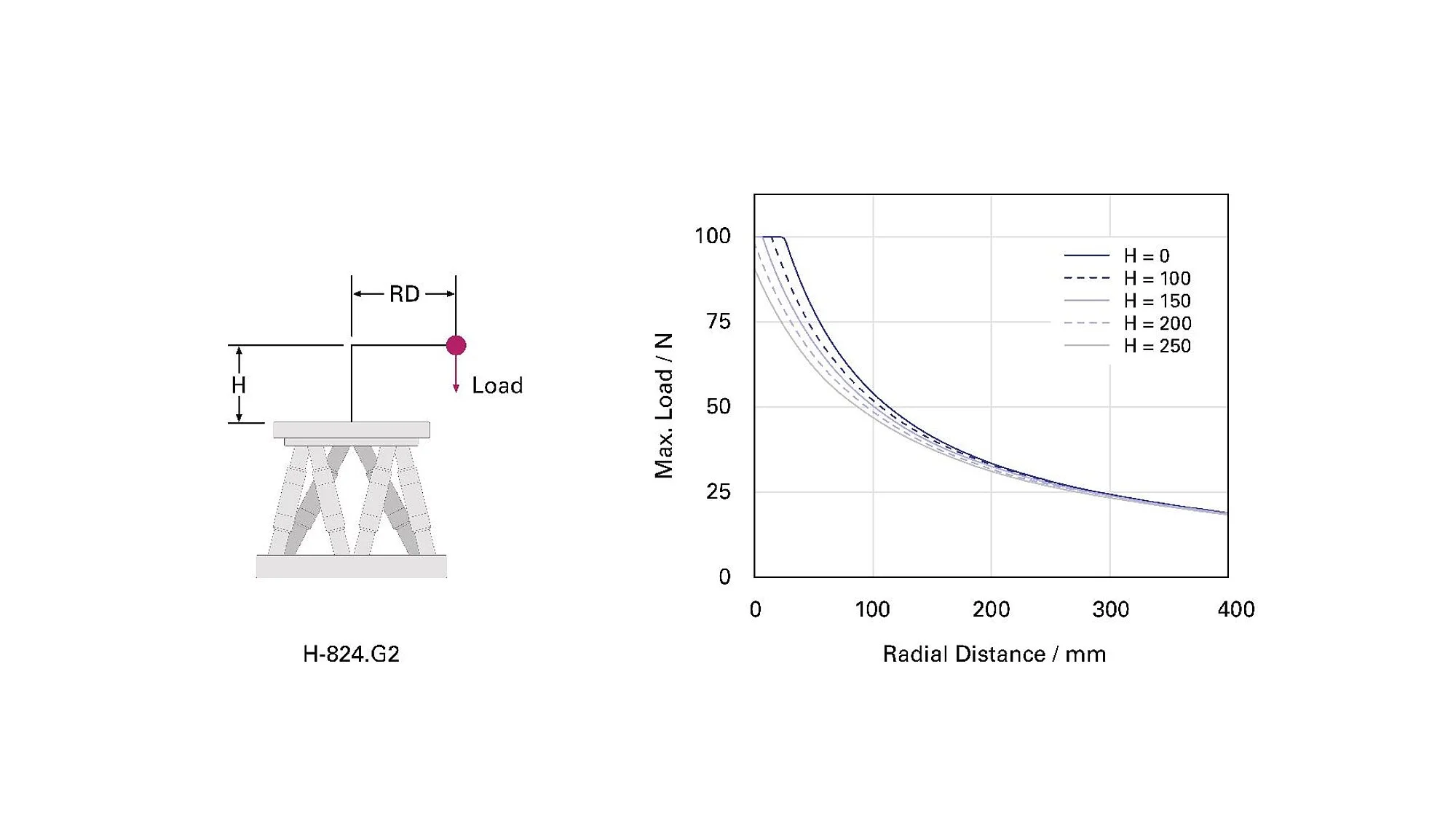
模拟软件模拟六足位移台的工作空间和有效载荷的限制。因此,即使在购买之前,您也可以检查特定的六足位移台型号是否能够处理应用中发生的负载、力和扭矩。为此,模拟工具考虑了六足位移台的位置和运动以及枢轴点和几个参考坐标系。
应用领域
工业和研究。用于显微作、生物技术、半导体制造


精密级 6 轴定位系统
6 个自由度的并联运动设计,使其比串联运动系统更紧凑、更坚固,更高的动态性能,无需移动电缆:更高的可靠性,减少摩擦。由于采用折叠式驱动设计,结构紧凑。
PIVirtualMove
模拟软件模拟六足位移台的工作空间和有效载荷的限制。因此,即使在购买之前,您也可以检查特定的六足位移台型号是否能够处理应用中发生的负载、力和扭矩。为此,模拟工具考虑了六足位移台的位置和运动以及枢轴点和几个参考坐标系。
应用领域
工业和研究。用于显微作、生物技术、半导体制造
运动 | H-824.D2 | H-824.G2 | 公差 |
活动轴 | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | X ǀ Y ǀ Z ǀ θX ǀ θY ǀ θZ | |
X 轴行程范围 | ± 22.5 毫米 | ± 22.5 毫米 | |
Y 轴行程范围 | ± 22.5 毫米 | ± 22.5 毫米 | |
Z 轴行程范围 | ± 12.5 毫米 | ± 12.5 毫米 | |
旋转范围(θX) | ± 7.5 ° | ± 7.5 ° | |
旋转范围(θY) | ± 7.5 ° | ± 7.5 ° | |
旋转范围(θZ) | ± 12.5 ° | ± 12.5 ° | |
X 轴最大速度 | 25 毫米/秒 | 1 毫米/秒 | |
建议的 X 轴速度 | 10 毫米/秒 | 0.5 毫米/秒 | |
Y 轴最大速度 | 25 毫米/秒 | 1 毫米/秒 | |
建议的 Y 速度 | 10 毫米/秒 | 0.5 毫米/秒 | |
Z 轴最大速度 | 25 毫米/秒 | 1 毫米/秒 | |
建议的 Z 速度 | 10 毫米/秒 | 0.5 毫米/秒 | |
最大角速度 (θX) | 270 mrad/s | 11 mrad/s | |
建议的角速度(θX) | 55 mrad/s | 5.5 mrad/秒 | |
最大角速度 (θY) | 270 mrad/s | 11 mrad/s | |
建议的角速度(θY) | 55 mrad/s | 5.5 mrad/s | |
最大角速度 (θZ) | 270 mrad/s | 11 mrad/s | |
建议的角速度(θZ ) | 55 mrad/s | 5.5 mrad/s | |
定位 | H-824.D2 | H-824.G2 | 公差 |
X 轴最小运动增量 | 2 微米 | 0.3 微米 | typ. |
Y 轴最小运动增量 | 2 微米 | 0.3 微米 | typ. |
Z 轴最小运动增量 | 1 微米 | 0.3 微米 | typ. |
最小运动增量(θX) | 12 微弧度 | 3.5 微弧度 | typ. |
最小运动增量(θY ) | 12 微弧度 | 3.5 微弧度 | typ. |
最小运动增量(θZ) | 14 微弧度 | 3.5 微弧度 | typ. |
X 轴单向重复精度 | ± 0.5 微米 | ± 0.25 微米 | typ. |
Y 轴单向重复精度 | ± 0.5 微米 | ± 0.25 微米 | typ. |
Z 轴单向重复精度 | ± 0.15 微米 | ± 0.1 微米 | typ. |
单向重复精度 (θX) | ± 3 μrad | ± 2 μrad | typ. |
单向重复精度(θY) | ± 3 μrad | ± 2 μrad | typ. |
单向重复精度(θZ) | ± 2.5 μrad | ± 2 μrad | typ. |
X 轴上的反向间隙 | 1.5 微米 | 2 微米 | typ. |
Y 轴上的反向间隙 | 1.5 微米 | 2 微米 | typ. |
Z 轴上的反向间隙 | 1 微米 | 0.7 微米 | typ. |
θX 中的反向间隙 | 15 微弧度 | 14 微弧度 | typ. |
θY 中的反向间隙 | 15 微弧度 | 14 微弧度 | typ. |
θZ 中的反向间隙 | 30 微弧度 | 17 微弧度 | typ. |
驱动器属性 | H-824.D2 | H-824.G2 | 公差 |
驱动器类型 | 直流电动机 | 直流减速电机 | |
标称电压 | 24 伏 | 24 伏 | |
机械性能 | H-824.D2 | H-824.G2 | 公差 |
X 轴刚度 | 1.7 N/um | 1.7 N/um | |
Y 轴刚度 | 1.7 N/um | 1.7 N/um | |
Z 轴刚度 | 7 N/um | 7 N/um | |
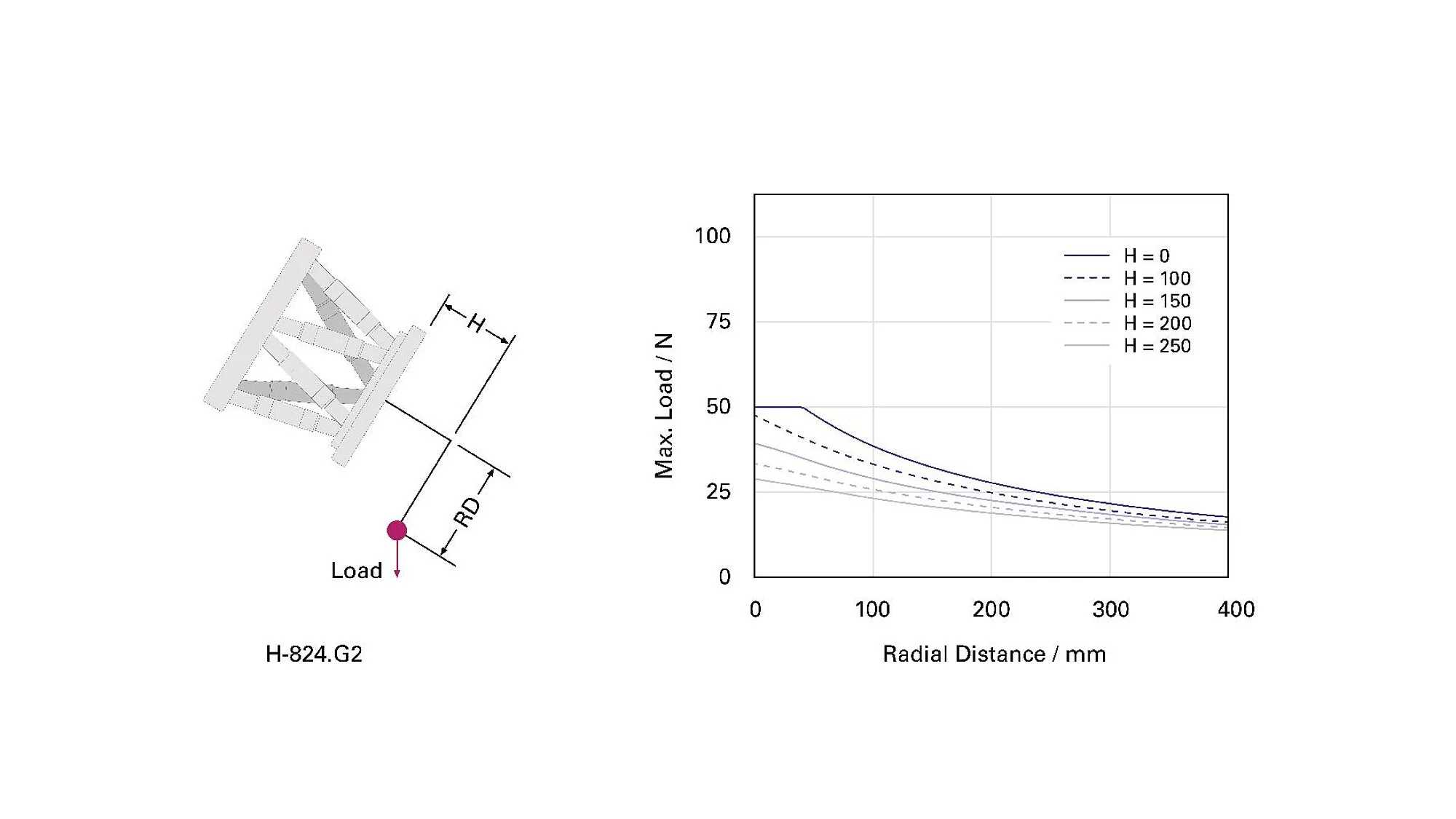
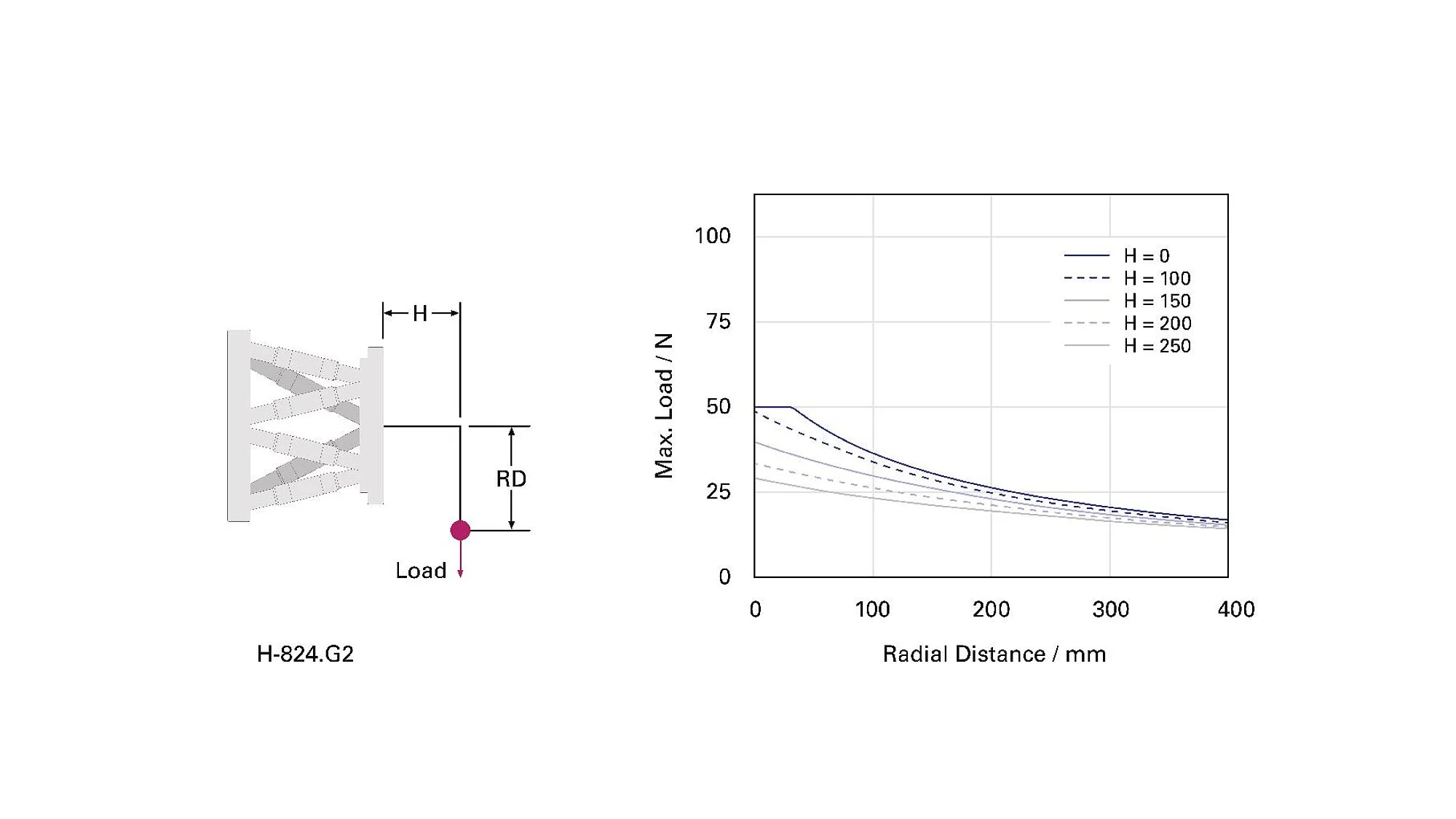
最大负载能力,任何方向的底板 | 2.5 千克 | 5 千克 | |
最大负载能力,底板水平 | 5 千克 | 10 千克 | |
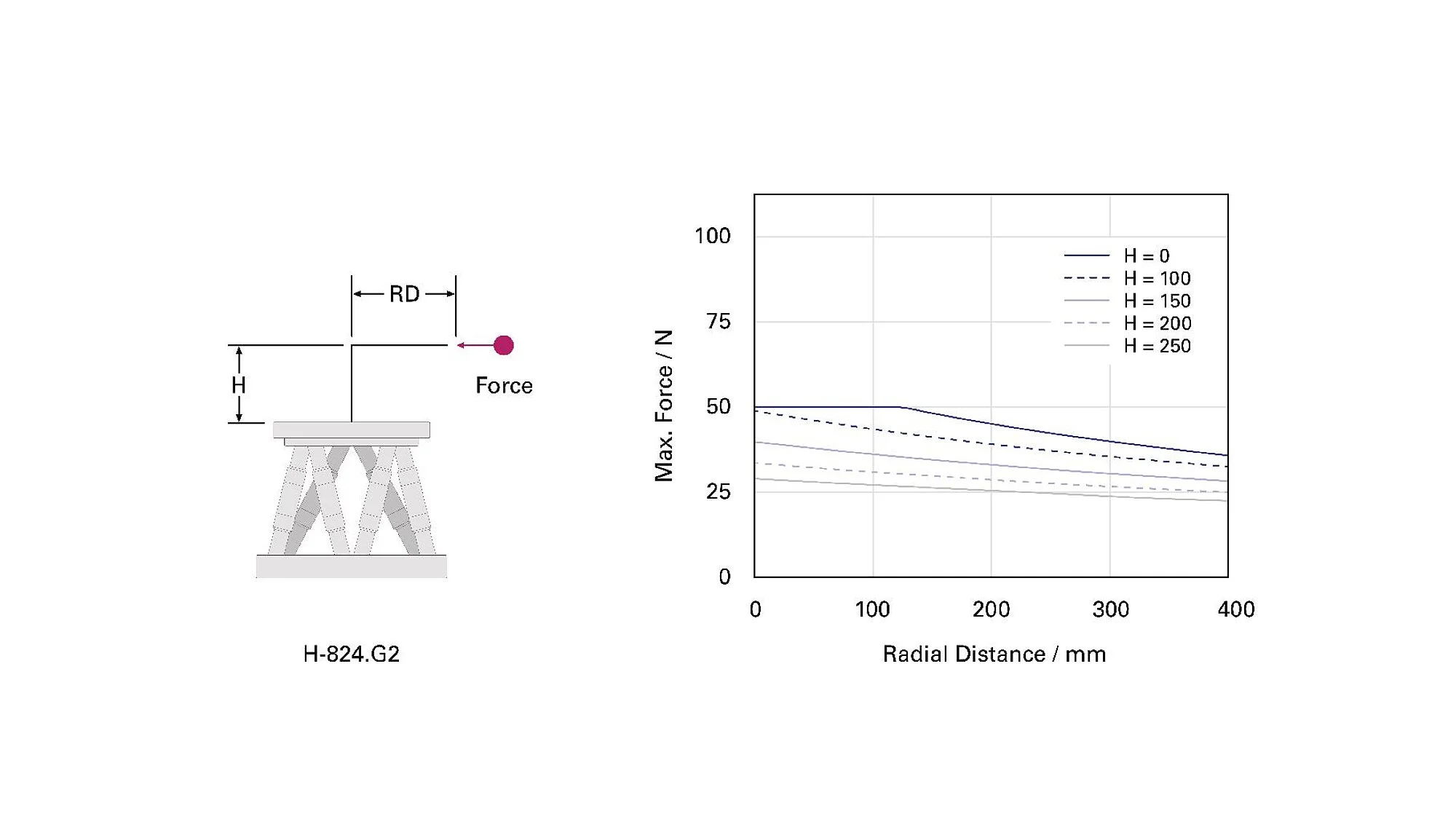
最大保持力,任何方向的底板 | 5 牛 | 50 牛 | |
最大保持力,底板水平 | 15 牛 | 100 牛 | |
总重量 | 8 千克 | 8 千克 | |
材料 | 铝 | 铝 | |
杂项 | H-824.D2 | H-824.G2 | 公差 |
工作温度范围 | -10 至 50 °C | -10 至 50 °C | |
数据传输连接器 | HD D-sub 78 (m) | HD D-sub 78 (m) | |
电源电压连接器 | M12 4-pole (m) | M12 4-pole (m) | |
推荐的控制器/驱动程序 | C-887.5x 型 | C-887.5x 型 |
连接电缆不包括在供货范围内,必须单独订购。
询问定制版本。
测量位置规格时,使用典型速度。数据以测量报告的形式包含在产品交付中,并存储在 PI 处。
各个坐标(X、Y、Z、θX、θY、θZ)的最大行程范围是相互依赖的。当所有其他轴都位于标称行程范围的零位置且使用默认坐标系时,或者更确切地说,当枢轴点设置为 0,0,0 时,每个轴的数据都会显示其最大行程范围。
在 PI,技术数据规定为 22 ±3 °C。 除非另有说明,否则这些值适用于未加载的条件。某些属性是相互依赖的。名称 “typ.” 表示属性的统计平均值;它并不表示所供应的每件产品的保证价值。在产品的最终检验期间,仅分析选定的属性,而不是所有属性。请注意,某些产品特性可能会随着运行时间的增加而恶化。
3D图请联系18384107989获取